PRODUKT-DATENBLATT: DREHSCHEIBE SPUR N – RESEGA v3.1
🛠️ HARDWARE-KOMPONENTEN (BOM)
| Komponente | Spezifikation | Nutzen für den Anwender |
|---|---|---|
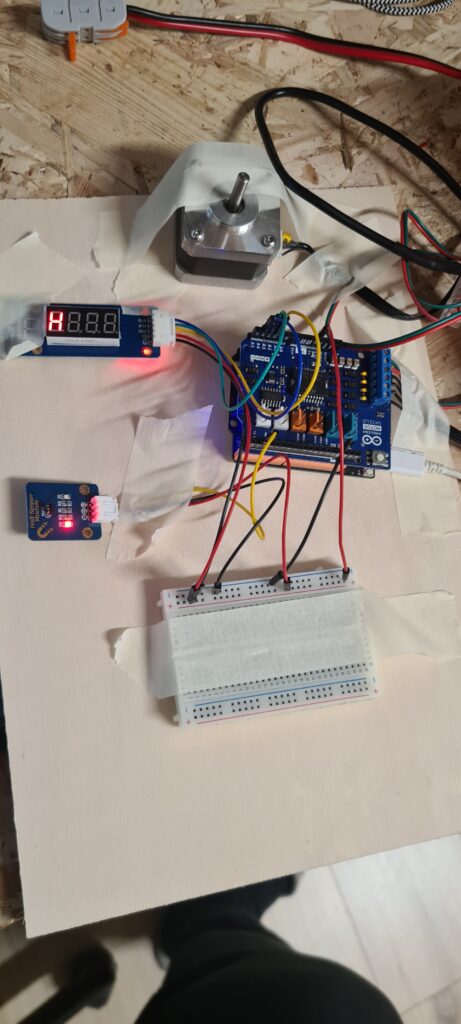
| Zentraleinheit | Arduino Uno BLE (Bluno) | Master-Logik mit optionaler Bluetooth-Schnittstelle. |
| Leistungstreiber | Arduino Motor Shield Rev3 | Kraftvolle Ansteuerung ohne Signalstörungen. |
| Präzisionsmotor | Stepper BJ42D (NEMA 17) | 200 Einzelschritte pro Umdrehung für exakte Gleisflucht. |
| Visualisierung | 8×8 Dot-Matrix (74HC595) | Sofortige optische Kontrolle der aktiven Gleisnummer. |
| Referenzsensor | Digitaler Hall-Effekt-Sensor | Wartungsfreie Nullpunkt-Suche via Magnetfeld. |
| Schnittstelle | USB / Seriell (9600 Baud) | Einfache Steuerung via PC, Zentrale oder Terminal. |
⚙️ SOFTWARE-EIGENSCHAFTEN (FIRMWARE-EXTRAS)
1. Auto-Homing & Smart Scan
Nach dem Einschalten kalibriert sich die RESEGA selbstständig. Während der Suche nach dem Magnet-Referenzpunkt informiert eine elegante Laufschrift („HOMING“) über den Status.
2. Hybrid-Visualisierung
Um das Platzangebot der Matrix optimal zu nutzen, verwendet das System eine hybride Anzeige:
- Gleis 1 bis 9: Klare arabische Ziffern.
- Gleis 10: Markantes römisches X (verhindert unleserliches Quetschen von Ziffern).
3. Cool-Drive & Energy-Save
Einzigartig in dieser Preisklasse: Sobald die Drehscheibe eingeloggt ist, wird die Stromzufuhr zum Motor unterbrochen.
- Vorteil: Keine brummenden Motoren, keine Hitzeentwicklung im Schattenbahnhof, maximale Lebensdauer.
4. Safety-First Diagnose
Sollte die Mechanik blockiert sein oder der Magnet fehlen, schaltet das System nach 15 Sekunden in den ERROR-Mode. Die Matrix warnt durch eine blinkende Fehlermeldung mit optimiertem Lese-Rhythmus.
💰 ARGUMENTE
- Plug & Play Design: Durch die Nutzung von Arduino-Standardkomponenten ist das System extrem wartungsfreundlich und modular erweiterbar.
- Keine Fehlbedienung: Das Programm ist so programmiert, dass es während der Fahrt keine neuen Befehle annimmt, bis das Ziel sicher erreicht ist.
- Störungsfrei: Optimierte Software-Filter verhindern, dass Texteingaben („Viktor“, „Pfau“) die Steuerung durcheinanderbringen.
- Ready for Mobile: Da ein Bluno-Board verbaut ist, kann das System (bei Reaktivierung) jederzeit per Smartphone-App gesteuert werden.
🔗 ANSCHLUSS-DEFINITION (INTERN)
- Anzeige: Pins A3, A4, A5 (Schieberegister-Bus)
- Sensorik: Pin A2 (Referenz-Magnet)
- Antrieb: Pins 3, 8, 9, 11, 12, 13 (Motor Shield Standard)